SailSwarm: Swarm of Autonomous Sail Boats
in Projects

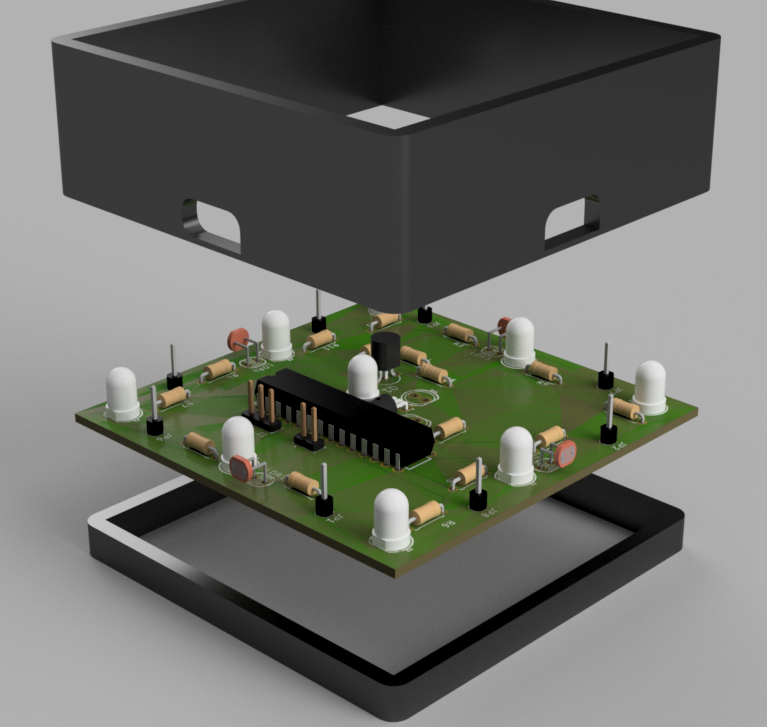
I was involved in the design and development of a Robot bee platform for mimicking bee wangle dance in a real beehive as a part of the EU H2020 funded project ’Hiveopolis’. In theory, such a robot could guide honeybees to a safe foraging site if humans determined that another site was contaminated with pesticides and was affecting the hive’s health. Also humans could direct honeybees away from a site that was being reserved for wild bees.
We present GenGrid, a comprehensive open-source distributed platform for swarm robotics experiments, which can accommodate different types of swarm robotics platforms such as Kilobot, Colias and similar robotic platforms. It acts as a tool for sensory feedback, messaging, macro-level data collection and interaction. It enables researchers to have programmable control over the experimental setup and its parameters. GenGrid is a modular grid of attachable computing nodes that provide for agent to grid-node and grid-node to grid-node bidirectional communication. This study describes the hardware and software architecture of the GenGrid system and some case studies accompanied by its distribution as a new open-hardware tool for the multi-robot research, swarm robotics and human-robot interaction community. We demonstrate the capabilities of the GenGrid using a 25-module 375mm X 375mm GenGrid, two robots, and the following case studies: obstacle avoidance, path following based on multiple gradients, pheromone-based foraging, collective transport, and shepherding.

An automotive enabled integrated sensory system is designed to identify physical discomfort of the passenger travelling in the public transportation system. The sensory system is designed to connect with the emergency response team for any immediate action.
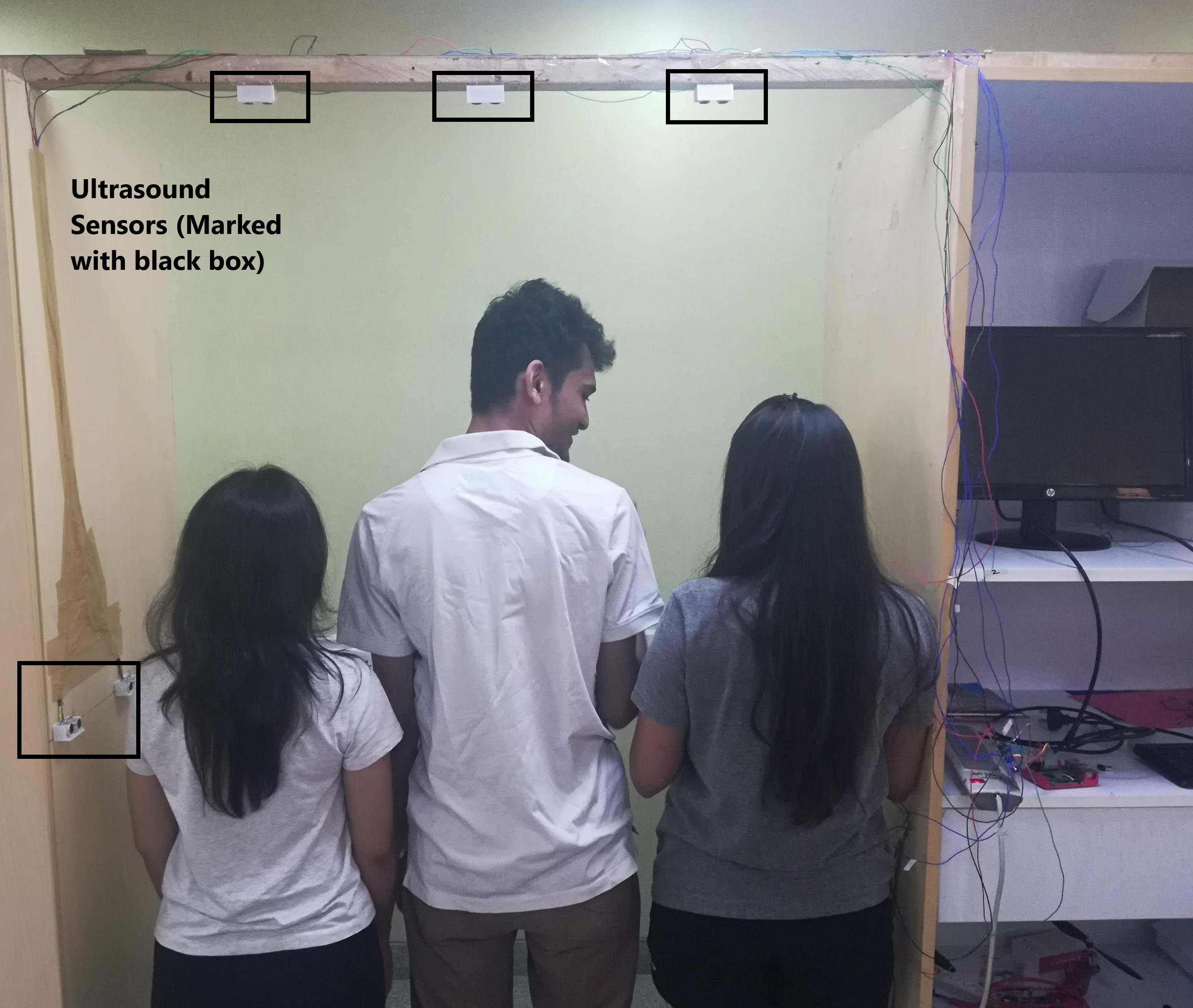
A network of real time ultrasound based smart door person occupancy detector was designed and developed to identify and monitor human movement through a door with applications in big public buildings with large footfall.
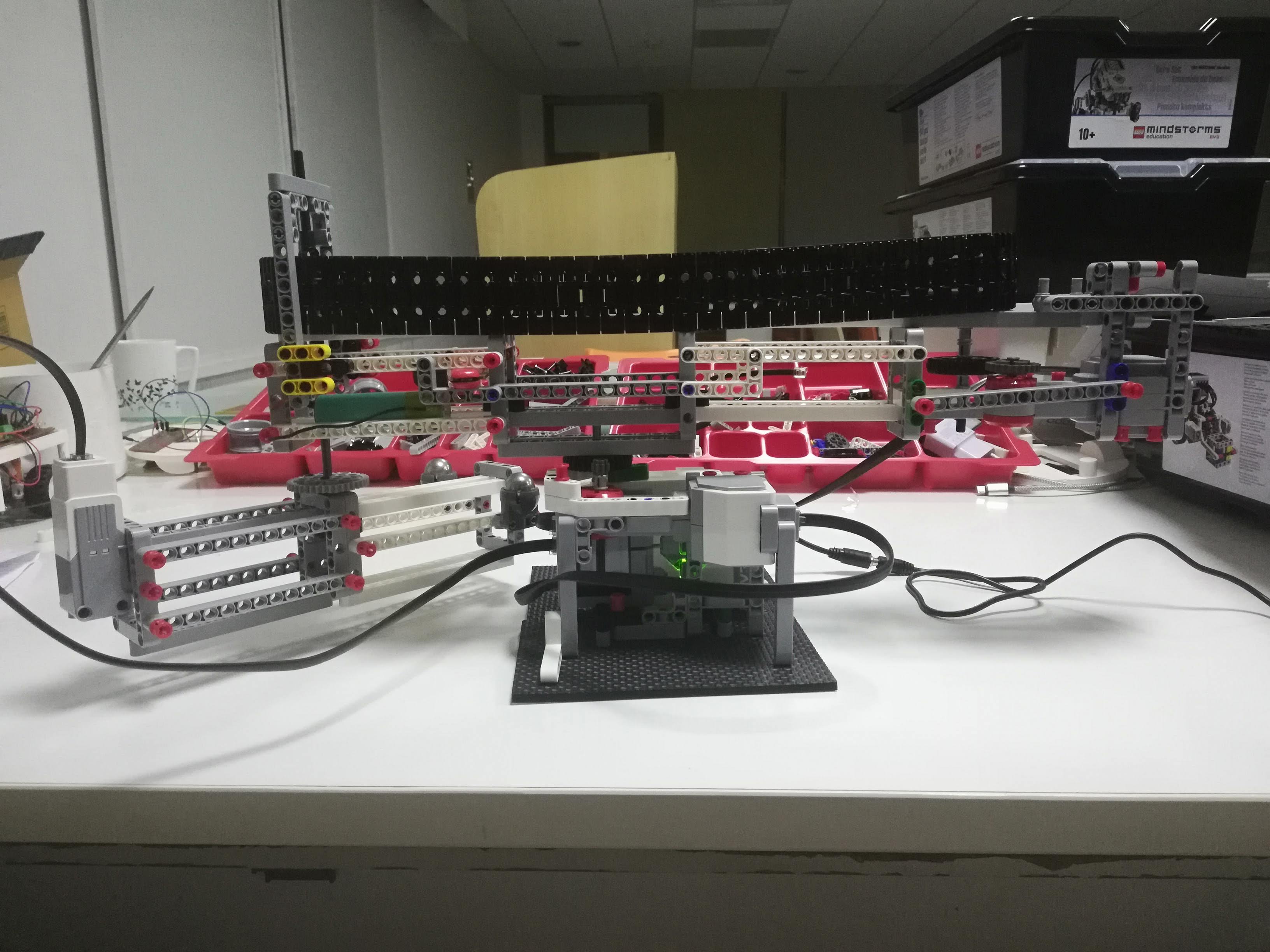
Designed a easily replicable 4 DOF and 2 DOF planar manipulator for testing various trajectory planning algorithms using LEGO MINDSTORMS EV3 with EV3Dev distro for better actuator and sensor data access.

Designed and developed an autonomous solar powered field tiller using image processing and magnetic encoders to solve simultaneous localization and mapping(SLAM) problem. More Info

Developed a hand based controller for various peripherals like mouse and keyboard through hand gesture and movement with applications in fields of VR and to help disabled people to communicate with others and is an easy interface to technology. More Info
